ISocRob - Years 1 and 2
In the first two years of the team, the players were (almost) exclusively
made up of socrob's: a home built platform. For Robocup'99 a
Scout was aquired, having stolen the spotlight (it scored all but one of
the goals). The experience aquired proved invaluable, and a necessary
step to adding a more robust feeling to the present scout team.
Specifications
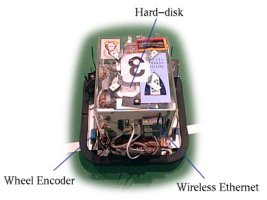
- Motherboard: 200MHz AMD-K6, 32MB RAM, 1.2GB disk, 10Mbps Ethernet;
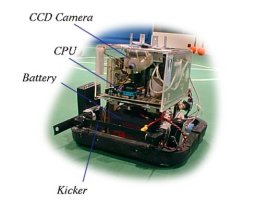
- Vision: Philips CCD camera, Broktree Bt848 based frame grabber;
- Communications: Aaron Wireless Ethernet Modem at 2.4GHz and 2.4835GHz;
- Motorization: Custom-made motor controllers based on LM629 PID-controller
and LM18200 H-bridge, 500-pulse encoders from HP, and two small motors
(with gearbox) in differential drive topology;
- Power: Two 12V 7Ah batteries, one for motors and kicker, and the other
for the motherboard and extra lightweight electronics, through a DC/DC
converter (input: 12V, output: +5V, -5V, +12V, -12V, all regulated);
- Kicker: Custom-made, based on two automobile central-lock pistols, IR
emitter and receiver to detect ball contact.
Parenthood
- Pedro Aparício: Original hardware design and implementation, helped with the software;
- Rodrigo Ventura: Original software design and implementation, helped with the hardware;
- Carlos Marques: Hardware improvements and maintenance for RoboCup'99.