| Date |
Photo |
Description |
| The day they arrived |
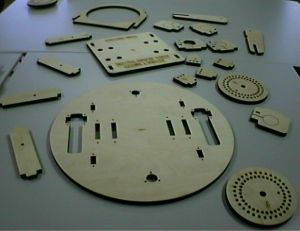 |
Laser-cut wood pieces that form the backbone of each
robot. The holes in the outer half of the each wheel
were supposed to be used as a cheap encoder, but we
decided for an external high-quality encoder.
|
| A couple of days later |
 |
Basic assembly with the backbone pieces of the last picture.
|
| When the motors arrived |
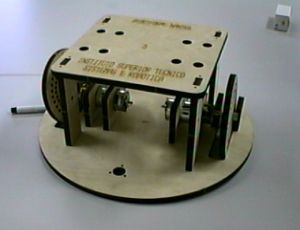 |
Same as last picture but with DC motors added. Note that the
wheel axis geometry will be considerably refined in the final
version. This picture shows how the weels and the DC motors
where supposed to be hang up according to the backbone design
plan.
|
| Assembled robot |
 |
One of the robots, almost ready (the camera is not in its final
location). The processing unit (a Pentium 200 motherboard) is
now on the top of the mechanical chassis. Some sensors were not
installed yet.
|
| Part of the team |
 |
Two of the robots, ready to go for the ball.
|
| The whole team |
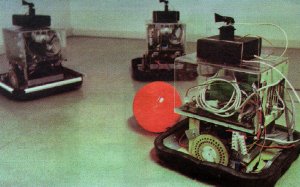 |
The three robots, including the IR receivers of the self-localization
system, not completely functional yet.
|