Role Switching
In the SocRob architecture, roles are seen as sets of behaviors. The behaviors for each role form a subset
of the overall available behaviors. Different roles may share behaviors.
Dynamic Role Switching
ISocRob players dynamically switch their roles during a game, based on an evaluation
of the current game state, performed by a logic-based rule system, written in Prolog. Selecting a role means
switching to a new set of allowed behaviors, and is usually constrained by the specified organization for the
team (e.g., 2 attackers, 1 defender and 1 goalkeeper), the number of currently alive robots in the team and
ball posession. This is work described in IAS-8 paper "Logic Based Hybrid Decision System for a Multi-robot Team".
Goalkeeper Role
Goalkeepers are usually the players prone to exhibit the richest behavior among the teammates.
The old IsocRob's goalkeeper was designed somewhat
differently from its teammates:
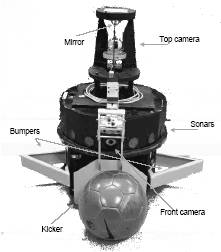
- It moved sideways, hence the front camera was located
laterally here (so that it faced the whole field)
- it had a protective assemblage (kind of a half-ring) to
increase the surface that could cover the goal width
In 2002-03, three visiting Dutch students (
Hans, Jakob and Michael)
from Aalborg University, developed a goalkeeper behavior
with some novel interesting features. Check this
video of the that ISocRob goalkeeper, which included hybrid-systems
design concepts. Their RoboCup2003 Symposium paper
Model
and Behavior-Based Robotic Goalkeeper described this work.
More recently, Nelson Ramos developed a fuzzy decision making algorithm for an omnidirectional goalkeeper, whose description
can be found in the paper
"Robot Behavior Coordination Based on Fuzzy Decision-Making"
{kind=link}