Navigation
The ability of the robot to self-localize, i.e., to autonomously
determine its position and orientation (posture) within its
surrounding environment, as well as its capacity to move from its
current posture to a desired new posture is one of the robot most
important features. Once a robot knows its posture, it is capable of
following a pre-planned virtual path or stabilizing its posture
smoothly. If the robot is part of a cooperative multi-robot team, it
can also exchange the posture information with its teammates so that
appropriate relational and organizational behaviors are
established.
In robotic soccer, these are crucial issues. If a robot knows its
posture, it can move towards a desired posture (e.g., facing the goal
with the ball in between). It can also know its teammate postures and
prepare a pass, or evaluate the game state from the team locations.
Navigation has been addressed within the SocRob project under two different
situations:
- Without the ball - This involved
- The development of a self-localization algorithm, based on
an omni-directional catadioptric vision system. The algorithm
determines the robot posture from one image frame acquired by the
catadioptric system, based on the correlation, in Hough Transform
space, of extracted information on the field geometry with an a priori
field geometric model (see picture). The posture is available for either
guiding the robot (see below) or exchange of posture information with
teammates. This algorithm is described in our RoboCup 2000 Workshop
scientific award challenge winning paper
"A
Localization Method for a Soccer Robot Using a Vision-Based
Omni-Directional Sensor", by Carlos Marques and Pedro Lima. There
is also a video (AVI) to download
illustrating this work. Notice that the robot self-localizes when it stops
(sometimes does it more than once because it detects a failure) and,
even after being "kidnapped" to a completely different posture, recovers
and can get back to its home position (on the left of the image, near the
wall).
- The implementation of guidance algorithms with obstacle
avoidance capabilities, to take the robot from its current posture (as
obtained from its odometry, periodically reset by the
self-localization algorithm) to a desired posture (e.g., robot home
position, facing the goal with the ball in between, covering own goal
between it and the ball). This is currently done when the robot does
not have ball posession, using the Freezone algorithm, described
in the paper "
Multi-Sensor Navigation for Soccer Robots". There
is also a video (AVI) to download
illustrating this work. The experiments include moving towards the ball
avoiding obstacles with periodic self-localization (reseting the odometry)
which is noticeable by the fact that, when the robot does not see the ball,
it gets back to its home position (on the left of the image, near the
wall).
An overall view of the whole navigation algorithm is provided by the IEEE
Robotics and Automation Magazine (Vol. 11, No. 3, 2004) Multi-Sensor Navigation for Non-Holonomic Robots in Cluttered Environments paper.
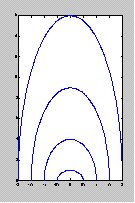
- With the ball - the work on navigation without the ball was
extended to the situation
where a robot does have the ball (i.e., a dribble is required if other
robots appear in the middle), by using a modified version of the potential
fields method, which includes a special potential field (see diagram), to take
into account the non-holonomicity of our robots, as well as constraints
on linear and angular speeds, to avoid losing the ball, given the strong
limitations on the robot "fingers" length (max one third of the ball diameter).
The work is described in the paper
A Modified Potencial Fields Method for Robot Navigation Applied to Dribbling in Robotic Soccer , and there is also
a video to download
illustrating this work.
Geometric "absolute" self-localization (i.e., posture coordinates w.r.t. a reference coordinate
system) is surely helpful, but trusting it too much in the presence of
uncertainties which sometimes cause wrong posture estimates may be
dangerous, especially if many behaviors depend on it. We are currently investigating methods of "relative" navigation (e.g., moving close to a goal, or
going around an obstacle) to combine them with our current solution.
More recent work has focused on MCL using the field lines + gyrodometry (check publications page), as well as on motion control algorithms taking advantage of the robots omnidirectional characteristic.