| OmniISocRob | |||
| Main | Human Team | Robots | Research | Publications | Tournaments | Pics and Movies | Press | Links | Sponsors | |||
In 2004-2006, a new robotic platform was developed by ISR/IST, in a joint venture with IdMind and ServiLog, two Portuguese SMEs. The new robotic team is composed of five omnidirectional robots.
 |
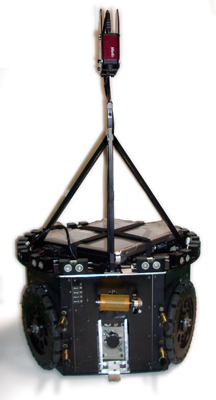 |
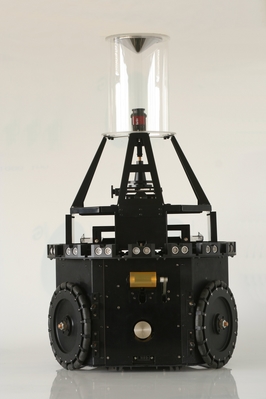
| Figure 1: Original platform (2006) | Figure 2: Current platform (2007) |
The new robots were developed with the goal to provide a multidisciplinary robot suitable for general Robotics research, not just the RoboCup domain. The set of sensors available on the previous Scout plataforms is also available in the new ones, plus some new sensors. The new robot currently carries the following sensors:
To cope with the multidisciplinary purpose of the robot several new actuators were also introduced. The new robot carries the following actuators:
The robot was built in a modular way, specially considering the top part. It can be removed and replaced by a new one, in case one wants to execute a special task which needs, e.g., a robotic arm. All the sensors and actuators are accessed via USB and firewire, which makes the robot electronics really plug-and-play. We currently use a laptop on the robot, but the USB access allows for an easy substitution of the computer by any other computer, as long as it possesses USB ports. In Fig. 2 we show only the down part of the robot.
 |
| Figure 3: Down part of Robot only |
In Figure 3 we can see the guts of the robot. Everything, except the laptop and the camera is inside this part of the robot. More descriptive pictures of our omnis can be seen here.
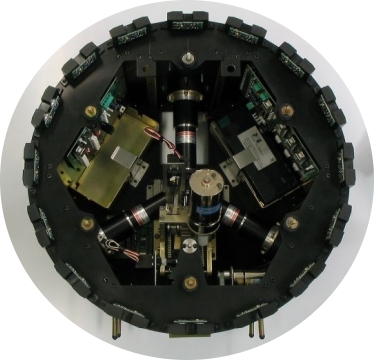 |
| Figure 4: Inside the robot down part |
For more details concerning the team status please read the Technical Description Paper. Several pictures of the original robot components can be seen here.