 |
 |
| A very bare Scout. The front sonar has been removed giving it's place for an Ultrak camera. |
The upward camera and mirror set. |
 |
 |
| The Scout is very unstable without this support. And, at the time this picture was taken, the compressed air containers hadn't been installed yet, making the robot even more heavy... |
In order to jamm everything into the Scout, we had to raise the lid by a few centimeters... |
 |
 |
| Actually, looking back, the field is comparatively tidy... |
The fourth robot had just arrived the day before!! |
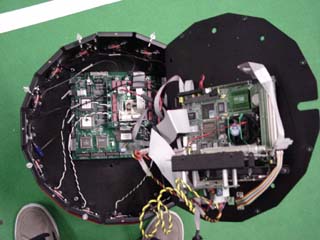 |
| This is how it comes from Nomadic. We add a PCI grabber, an Ultrak camera, a PC104 PCMCIA expansion, a circuit board controlling the kicker... The inside of the Scout gets very crammed. |
Unfortunately, the most interesting parts -- setting up of the kickers, the vision systems, the instalation of the PCMCIA/PC104 interface, etc etc -- weren't documented. Reason: TWO weeks to go!! No time for fooling around with a digital camera! |