Table of Contents
![]()
SocRob@Home

Our main research group, Intelligent Robots and Systems from ISR, IST, coordinated a major EU funded project directly related to human-robot interactions and social behaviors: MOnarCH. This project aimed to provide a set of robots with the capabilities of performing tasks to entertaining kids with health problems (more specifically, cancer) from the Instituto Português de Oncologia Francisco Gentil in Lisbon (IPO) in an autonomous and distributed way.
Also, our group ran, from 2013 until 2015, the EU funded project RoCKIn alongside five other partners, where a set of competitions related to domestic and work environments were organized to test new benchmark methods for evaluating challenging new aspects of state-of-the-art robots.
These two projects, plus the challenge that a domestic solution for robotics offers, convinced us to gather and form an unique team, highly motivated and ready for all challenges to come!
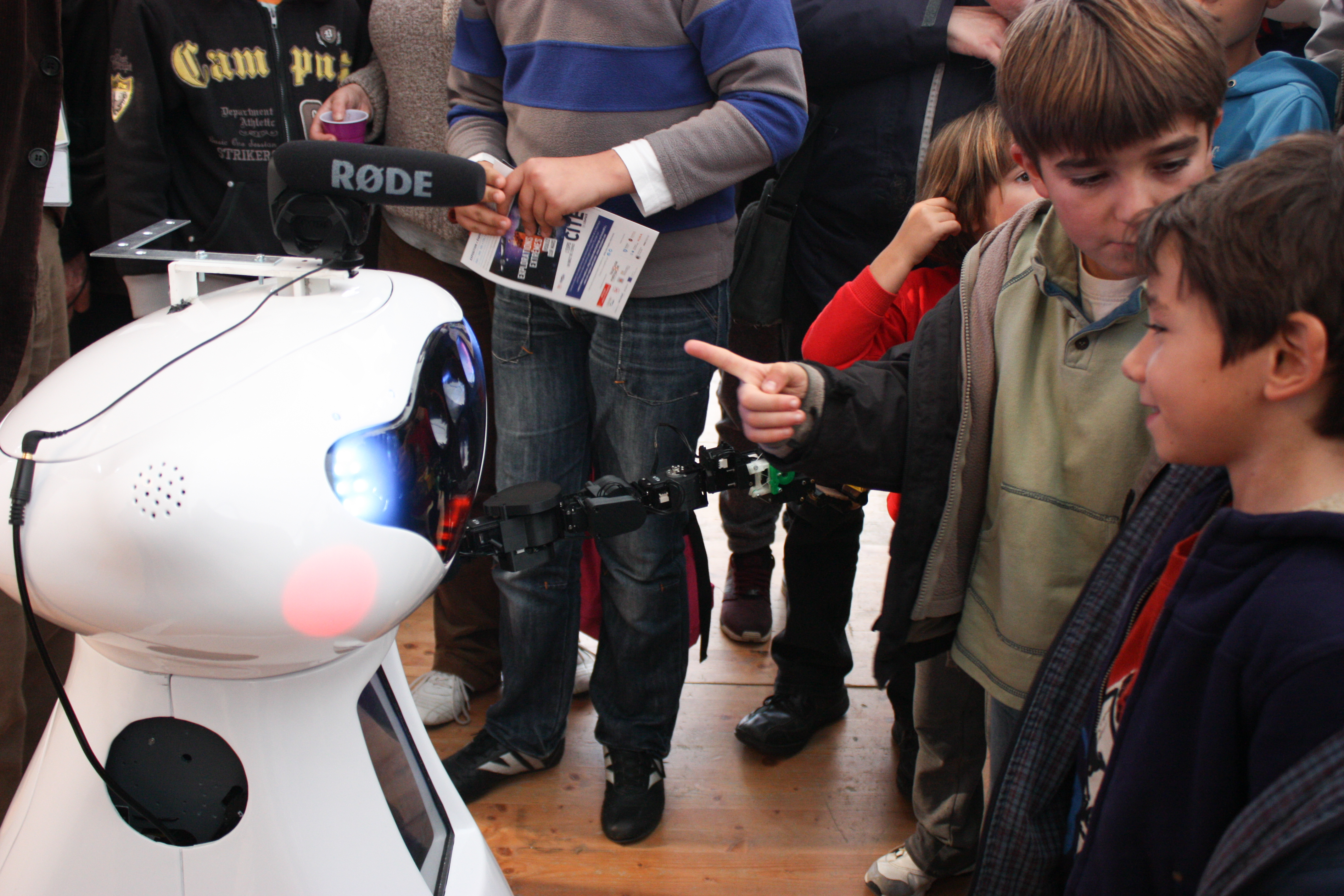
Current Robot: MBot
(also known as Mordomo, also known as Gasparzinho)

The MBot is composed of two main parts: body and head. The head can pan and has LED backlight to express emotions through a drawn mouth, eyes and checks. The body has all of the CPU devices (two motherboards with i7 processors), a touchscreen and all of the navigation mechanics, based on a Four-Wheel Omnbidirectional Mecanum drive.
Regarding additional sensors and actuators needed specifically for @Home competitions, a Cyton 1500 Robai Arm with 7 DoF was attached to the left side of the body for manipulation capabilities and a microfone was placed on the top of the head for voice recognition.
This robot replaced ISR-Cobot for our @Home missions, as it proved to have more computational power, robustness and better aesthetics towards our goal.
Participations
You can check our participations in events with the ISR-CoBot here.
Participations with the MBOT:
- RoCKIn Camp 2014, Rome, Italy
- Best Team in Manipulation
- Video here.
- RoCKIn Competition 2014, Toulouse, France
- Best Demo
- RoCKIn Camp 2015, Peccioli, Italy
- RoCKIn@Home Benchmarking Award
- RoboCup GermanOpen 2015, Magdeburg, Germany
- Most Appealing Robot
- RoCKIn Competition 2015, Lisbon, Portugal
- RoboCup Competition 2016, Leipzig, Germany
- RoboCup German Open 2017
- 5th place.
- European Robotics League - Major Tournament - 2017, Lisbon, Portugal
- 2nd place in TBM1 (semantic mapping)
- 1st place in TBM4 (navigation)
- 1st place in FBM1 (perception)
- 1st place in FBM2 (navigation)
- 3rd place in FBM3 (speech recognition and natural language understanding)
- European Robotics League - Local Tournament - 2017, Barcelona, Spain
- Robótica 2018, Torre Vedras, Portugal
Team Members
Our team is comprised of students and researchers related with robotics. From post-docs to MSc students on a voluntary basis, all of them contribute hand-on to the project.
2018
- Pedro Lima (Associate Professor - Project Coordinator)
- Rodrigo Ventura (Assistant Professor - Professor in charge)
- Oscar Lima (PhD Student - Team leader)
- Guilherme Lawless (PhD student - Team leader)
- Carlos Azevedo (PhD Student)
- Enrico Piazza (PhD Student)
- Tiago Dias (PhD Student)
- Mithun Kinarullathil (Researcher Engineer)
- Jhielson Pimentel (Researcher Engineer)
- Rute Luz (MSc Student)
- Miguel Silve (MSc Student)
- Louis Chopot (MSc Student)
- João Gonçalves (MSc Student)
- João Cartucho (MSc Student)
- Inês Alexandre (MSc Student)
- Diogo Serra (Lab Technician)
Publications
* F. Amigoni, E. Bastianelli, J. Berghofer, A. Bonarini, G. Fontana, N. Hochgeschwender, L. Iocchi, G. Kraetzschmar, Pedro Lima, M. Matteucci, Pedro Miraldo, D. Nardi, V. Schiaffonati, Enabling Replicable Experiments and Benchmarking with RoCKIn Competitions, IEEE Robotics and Automation Magazine, 22(3), pp. 53-61. ISSN : 1070-9932, DOI:10.1109/MRA.2015.2448871, 2015
* André Mateus, Pedro Miraldo, Pedro Lima, João Sequeira, Human-Aware Navigation using External Omnidirectional Cameras, Proc. of ROBOT 2015 - 2nd Iberian Robotics Conference, Lisbon, Portugal. Springer Advances in Intelligent Systems and Computing Vol. 417, pp. 283-295, 2015
* D. Sanz, Aamir Ahmad, Pedro Lima, Onboard robust person detection and tracking for domestic service robots, Proc. of ROBOT 2015 - 2nd Iberian Robotics Conference, Lisbon, Portugal. Springer Advances in Intelligent Systems and Computing Vol. 417, pp. 547-559, 2015
* Miguel Vaz and Rodrigo Ventura. Real-time ground-plane based mobile localization using depth camera in real scenarios. Journal of Intelligent & Robotic Systems, pages 1–12, 2015.
* Rodrigo Ventura and Aamir Ahmad. RoboCup 2014: Robot World Cup XVIII, chapter Towards Optimal Robot Navigation in Urban Homes, pages 318–331. LNAI 8992. Springer, 2015.
* Rodrigo Ventura. New Trends on Medical and Service Robots: Challenges and Solutions, volume 20 of MMS, chapter Two Faces of Human-robot Interaction: Field and Service robots, pages 177–192. Springer, 2014.
* João Messias, Rodrigo Ventura, Pedro Lima, João Sequeira, Paulo Alvito, Carlos Marques, and Paulo Carriço. A robotic platform for edutainment activities in a pediatric hospital. In Proceedings of the IEEE International Conference on Autonomous Robot Systems and Competitions, 2014.
Past Members
- Francisco Lera (PhD Student)
- Pedro Miraldo (Post-doc)
- Meysam Basiri (Post-doc)
- Tiago Veiga (Post-doc)
- Aamir Ahmad (ex-Post-doc)
- João Messias (ex-Post-doc)
- Filipe Jesus (ex-Research Engineer)
- André Farinha (ex-MSc student)
- João O'Neill (ex-MSc student)
- João Mendes (Research Engineer)
- Pedro Resende (MSc Student)
- Diogo Pires (MSc Student)
- Maria Braga (MSc Student)
- Carolina Loureiro (MSc Student)
- André Mateus (MSc Student)
- Pedro Santos (MSc Student)
- Ricardo Simas (MSc Student)
- Nuno Mendes (MSc Student)
- José Iglesias (MSc Student)
- João Garcia (MSc Student)
- Luis Luz (MSc Student)
- João Cerejeira (MSc Student)
- Soraia Ferreira (MSc Student)
- Diogo Maximino (MSc Student)
Previous Robot: ISR-CoBot

ISR-CoBot is is an experimental platform for research in Human-Robot Interaction (HRI). It is a service robot for office environments designed to perform tasks for users. The research is targeted towards a robust platform capable of navigating in crowded environments. We aim at robots that are aware of their own limitations, and are thus capable to autonomously asking humans for help. This way we expect to get closer to the goal of a symbiotic interaction between humans and robots.
The platform is based on a customized Nomadic Scout differential drive platform. Its equipment includes a touchscreen on a laptop for HRI and computing, an Hokuyo UTM-30LX laser range finder (range 30m), a Kinect RGB-D camera, and an IP PTZ camera.
This robot resulted from an ongoing collaboration with the CoBot project at Carnegie Mellon University.
More information can be found here.